邁向智慧製造:機械手臂整合視覺的現況與未來
■達明機器人
前言
機器人學 (Robotics) 與機器視覺 (Machine Vision),分別是兩門歷史悠久的研究領域,機器人學通常屬於機械工程、自動控制工程領域;而機器視覺則是歸屬資訊工程、電機工程等。透過這兩大領域的專家合作,來賦予機器人視覺感知的能力。由此可知,機器人視覺是一項仰賴高度整合的工程技術,透過機器視覺偵測環境中的人與物,計算出其於相機座標系統上的位置後,轉換至機械手臂座標系統,再驅動馬達帶動軸關節對目標物進行操作,看似簡單的過程,實則隱含著複雜的電腦運算。在本文中,我們著重介紹手(機器人)與眼(機器視覺)整合的現況、挑戰與未來。
手眼關係各有優缺,相對位置決定手臂相機合作模式傳統機器手臂編程是透過多個手臂移動點位的教導,讓手臂循相同點位重複執行相同動作。因為點位均為固定的,所以需要利用大量治具來固定工件或週邊加工機械,應用上彈性較差。且一旦遇地震或外力影響改變手臂與工作區域個物件的相對關係,則所有的點位都要重新進行教導。倘若手臂結合機器視覺,則可透過視覺辨識與補償的能力,彈性修正手臂移動的位置,並有效減少治具的使用,增加處理多樣且多姿態工件的彈性。
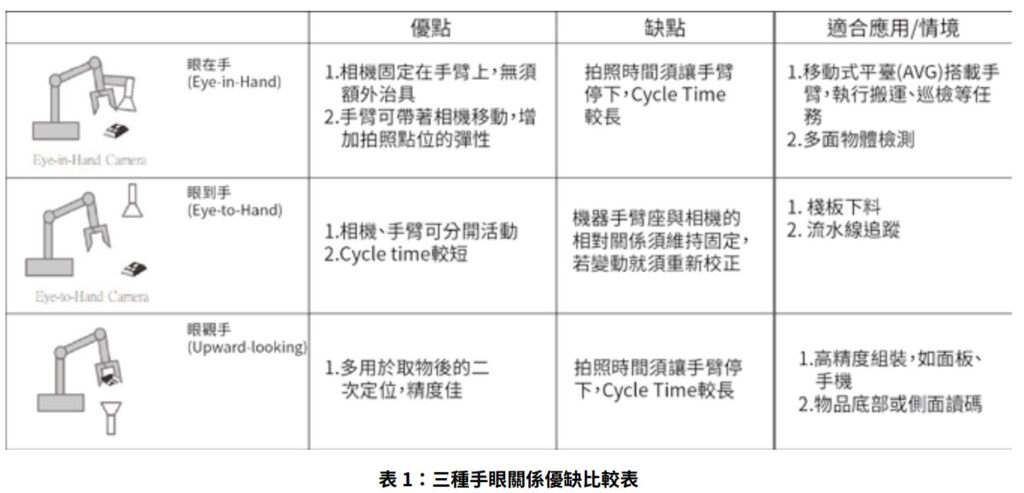
機器手臂與相機(視覺)間如何合作取決於手臂和相機的空間關係,亦稱為手眼關係,可分為「眼在手(Eye-in-Hand)」、「 眼到手 (Eye-to-Hand)」 與「 眼觀手 (Upward-looking)」。
眼在手是將相機掛在手臂的末端軸上,先完成相機拍照與視覺辨識後,再驅動手臂對工件進行夾取;眼到手則是相機與手臂分開固定於兩個位置,相機在取像與辨識的時候,手臂可同時進行移動,因此有較佳的生產週期 (Cycle time),但使用上須確保手臂座與相機維持固定的相對關係,若兩者關係改變,則需要重新進行校正;至於眼觀手架構,又稱二次定位,是當手臂夾取工件後,移動到相機視野內,比較當前姿態與標準姿態的差異,再做進一步的姿態補償,此種模式能擁有較佳的定位精度。
手臂整合視覺需仰賴專業系統整合,導入自動化首重精度與生產週期
機器手臂與機器視覺的整合,以目前產業發展的現況,尚非容易之事,終端客戶若非擁有一定程度的工程能力,仍需具專業知識的系統整合商協助。手臂的部分,系統整合商在挑選合適手臂時,首先要考慮臂長與負重,臂長可確保有效的工作範圍,關於負重則要計算掛載夾爪等終端效應器 (End Effector) 與工件時,能否符合手臂工作的額定負重範圍。
另一方面,視覺解決方案的整合亦有多樣的選擇。針對多相機需求且高電腦運算負擔的情境,往往會選用視覺控制器 (Vision Controller),在硬體上其本質為一工業電腦,通常可支援二到四支工業相機,有內建影像辨識軟體,讓使用者可對其要解決的視覺辨識問題進行編程。另一類產品為智能相機 (Smart Camera),其本身為含有 CCD/CMOS 感測器之嵌入式運算平臺,使用者可針對其工作視野挑選合適的鏡頭,該平臺亦含有視覺處理軟體,但運算效能較視覺控制器差,通常應用在讀碼、定位等。此外,亦有部分系統整合商為節省成本或提高彈性,會自行整合商用或免費的視覺函式庫,開發專用軟體。
除考慮合適的手臂機型與視覺解決方案外,在評估自 動 化 案 件 的 可 行 性 時, 最 重 要 的 指 標 即 為 精 度(Precision) 與生產週期 (Cycle Time)。足夠高的精度能確保每個工序的正確性,而符合預期的生產週期才能評估產能是否隨導入自動化提升並計算投資報酬率(ROI, Return on Investment)。前述的精度部分,若物件是透過視覺定位,則會影響到整體精度的因素包含相機解析度、定位演算法、手眼關係校正誤差、相機鏡頭校正誤差、手臂的重複精度與絕對精度等,需仰賴有經驗的機器視覺技術人員才能有效評估。
手臂內建視覺 整合成本大降低
近幾年來,協作型機器手臂 (collaborative robot) 因擁有安全性高、可和工作人員處在同一環境下工作、易於編程、使用者學習門檻低等相對於傳統機器人更具優勢的特性,在市場中帶起一波新風潮。另外,部分機器手臂廠商如達明機器人,更將視覺模組直接整合至手臂中,成為標準產品販售,使用者僅需利用內建的單一軟體就能完成手臂運動流程教導以及視覺流程編輯,大幅降低使用者原本需投入在整合手臂與視覺的成本,並可有效減少系統調校的時間。
放眼未來,隨著視覺感測技術的提升與人工智慧的快速發展,相機取得的影像資訊可由 2D 提升至 3D 乃至於 RGB-D 等包含更豐富的色彩與幾何資訊,而透過人工智慧在辨識能力的提升,將更能有效解決物件在姿態、物距、形貌上的變異,未來的機器人,勢必更具有感測環境、理解使用者的能力,值得我們拭目以待。■